Issue
In large-scale agriculture, traditional methods of planting seeds involve a large rotating wheel with mechanical fingers that picks up individual seeds and plants them into the ground in a consistent interval. This method works well for planting large numbers of seeds across vast fields, but has limited application for smaller seeds in greenhouse settings. Seeds planted in greenhouses are typically planted by hand, or by other non-commercial methods. The solution to commercialize the planting of smaller seeds in greenhouse settings is a machine that can precisely pick up one seed at a time and put it down in a precise location at consistent intervals for long stretches of soil.
Solution
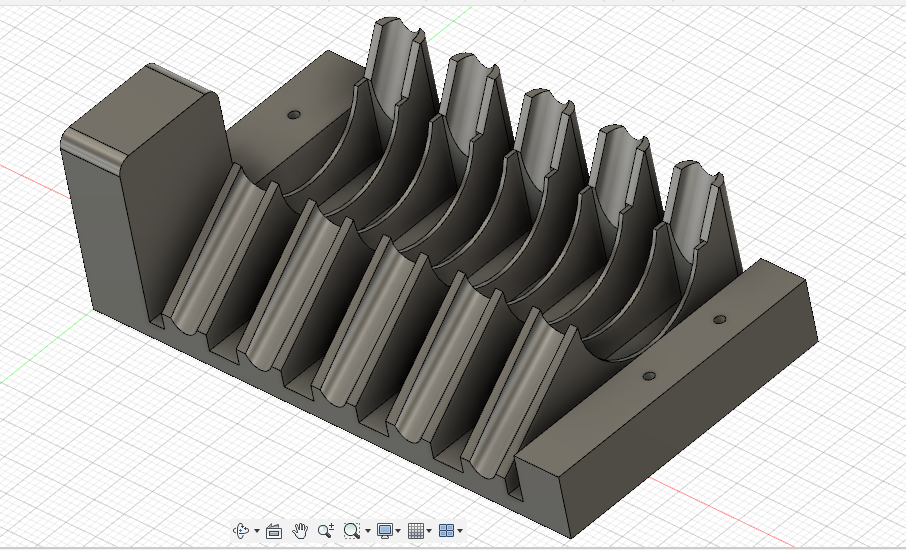
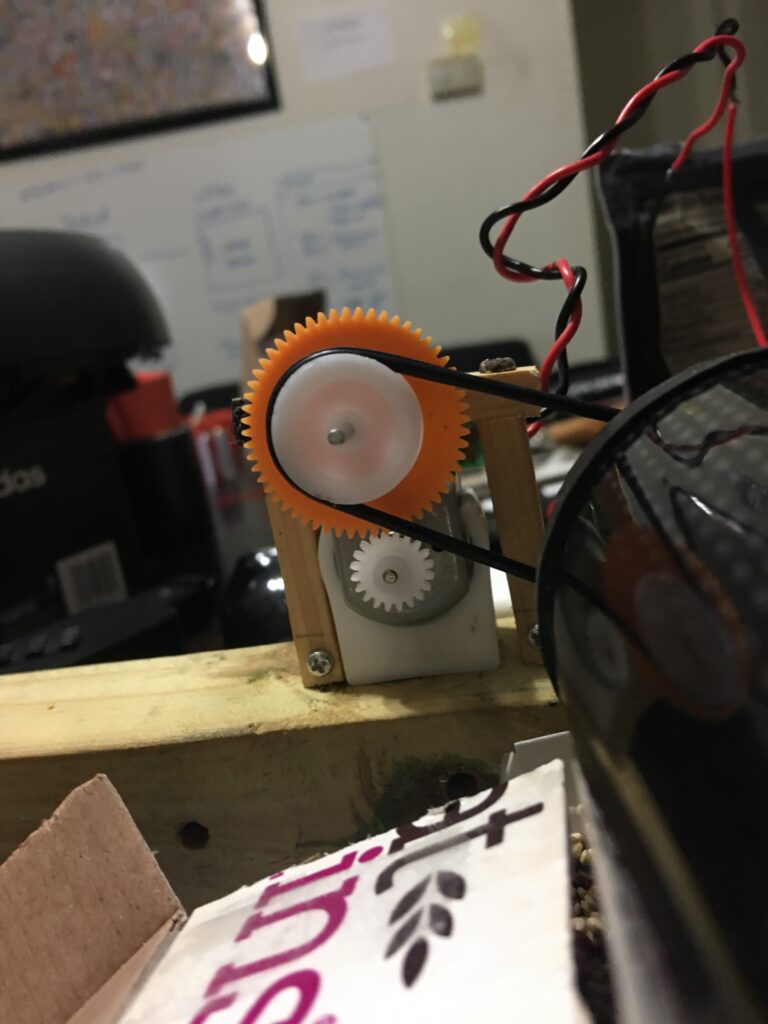
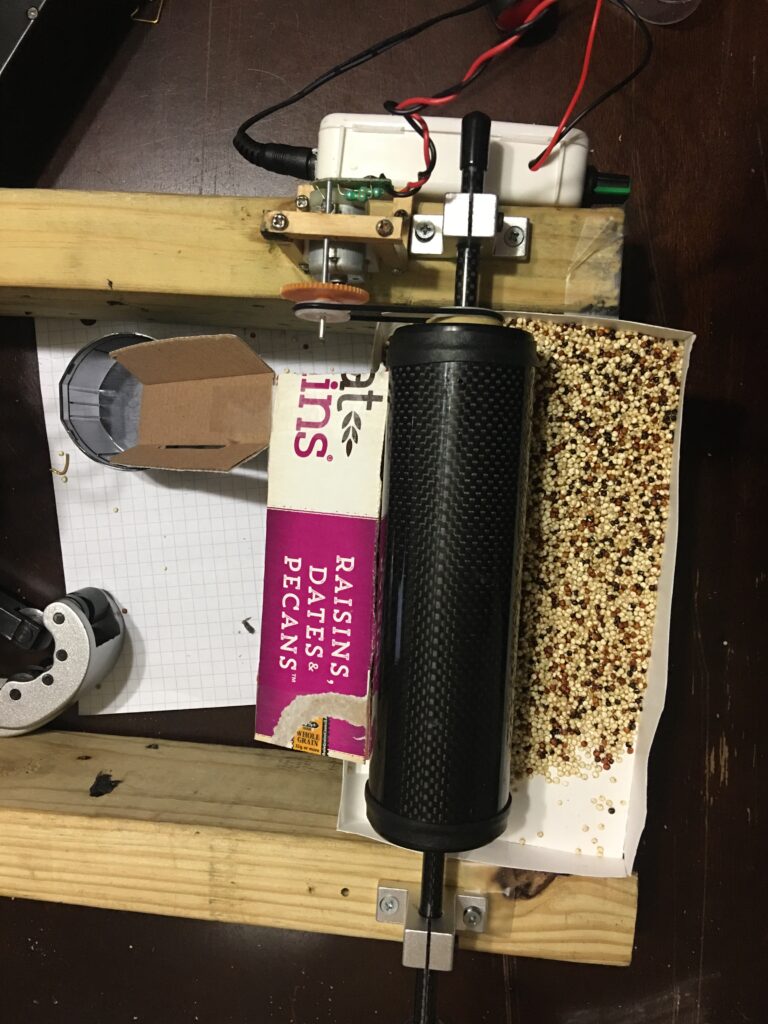
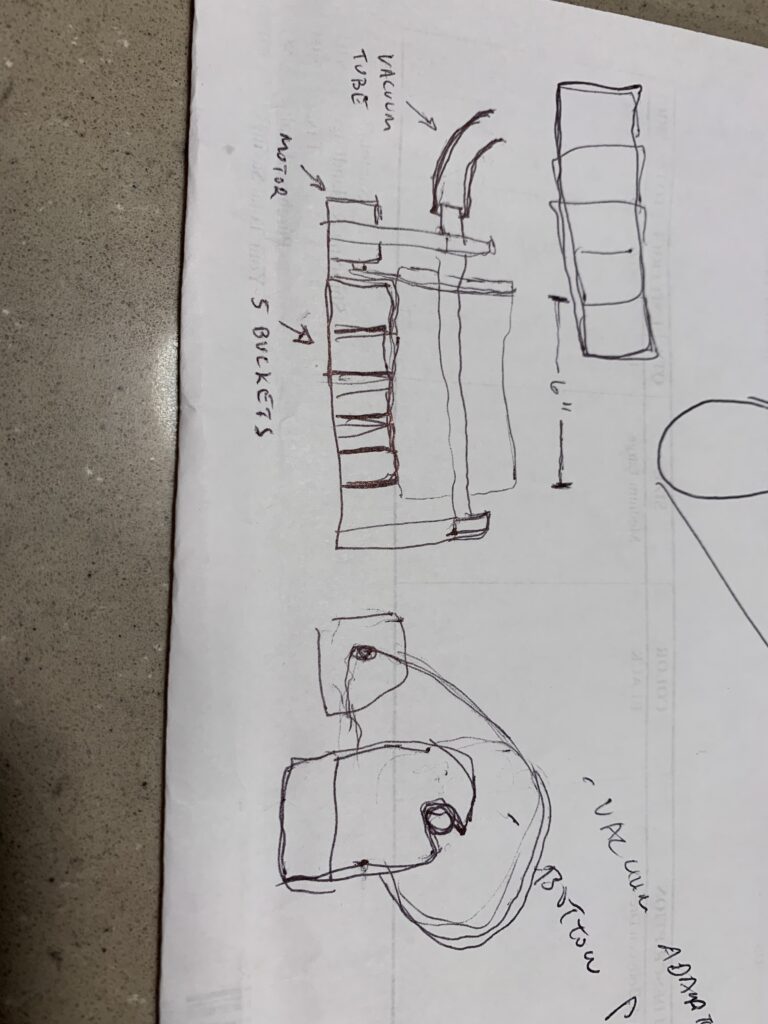
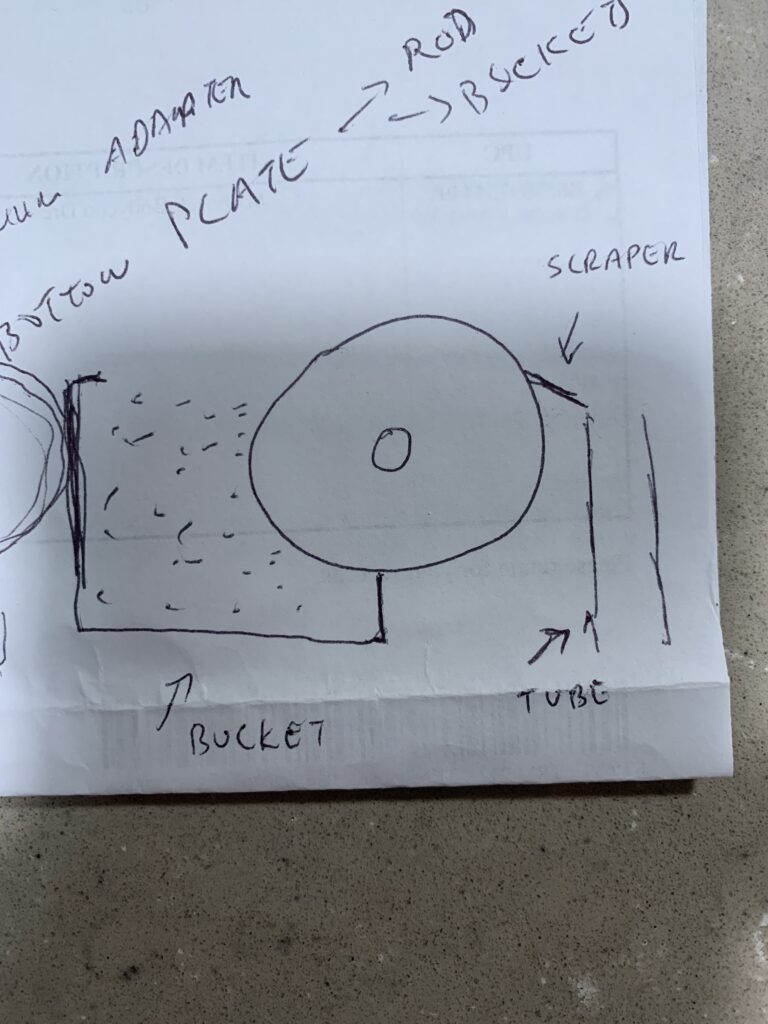
The solution is a vacuum chamber that sucks up one seed per hole from a chamber containing seeds, then drops it into a bin at consistent intervals. The first level prototype is shown here, which includes proof of concept for the vacuum chambers ability to pick up the seeds and drop them in a bin at regular intervals, however, the full application will include the ability to pick up seeds from several holes and drop multiple at once, as well as giving the ability for the system to move linearly so that the seeds can be planted in rows.
Result
The result was a functional proof of concept that was eventually 3D printed and tested with real seeds. The seeds were able to be successfully picked up by the vacuum chamber and placed into a bin at consistent intervals. This proof of concept has big implications for the future of greenhouse agriculture.